О магнитной левитации
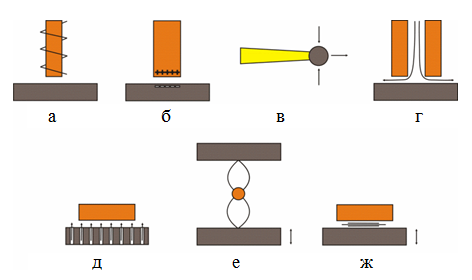
На сегодняшний день в различных областях техники большое внимание уделяется вопросам практического приложения так называемой технической левитации. В настоящее время существуют самые разнообразные виды технической левитации: а – магнитная; б – электрическая; в – оптическая; г – на принципе Бернули; д – на воздушной подушке; е – на стоячей волне; ж – на ближнем поле.
Наиболее распространенной сегодня является магнитная левитация (от англ. magnetic levitation – «магнитная левитация») – явление подвеса тела в магнитном поле, компенсирующем гравитационное поле Земли.
Физически явление магнитной левитации основывается на фундаментальных законах физики. В частности, на законе Био–Савара–Лапласа и законе Ампера. Закон Био–Савара–Лапласа определяет величину магнитного поля B ⃗ элемента (∆L) ⃗ с током I:
B ⃗=(μμ_0)/4π I/r^3 [∆L ⃗,r ⃗ ],
где μ – магнитная проницаемость среды;
μ_0 – магнитная проницаемость вакуума;
I – сила тока;
r – расстояние до точки наблюдения;
∆L – элемент длины, создающий магнитное поле.
B ⃗=(μμ_0)/4π [j ⃗∆V,r ⃗ ]/r^3
Закон Ампера определяет силу dF ⃗, действующую на ток плотностью j ⃗ в магнитном поле B ⃗:
dF ⃗=j ⃗×B ⃗
В соответствии со следствием из закона Ампера два проводника с токами I_1 и I_2 во встречных направлениях отталкиваются друг от друга, а с токами I_1 и I_2 в согласных направлениях – притягиваются. Сила взаимодействия элементов dl с токами I_1 и I_2 определяется соотношением:
dF=μ_0/4π (2I_1 I_2)/r dl
На этом принципе основана работа электромагнитов.
Применение данных выражений к конкретным задачам и нахождение результирующего магнитного поля и силы левитации определяется условиями решаемой задачи.
Аналогичная сила отталкивания действует на одноименные полюса постоянного магнита, а притягивающая сила – на их разноименные полюса. Причем для построения математической модели используется понятие поверхностных токов магнитов, аналогичных токам электромагнитов. Использование этих сил для компенсации силы тяжести приводит к явлению левитации тел в магнитном поле.
Особенности механической устойчивости тел в магнитном поле описывается теоремой Ирншоу.
Таким образом, явление магнитной левитации является полностью физически обоснованным и описывается классическими законами электростатики и электродинамики.
В настоящее время магнитная левитация нашла самое разнообразное практическое применение, в частности, в таких устройствах как магнитные подшипники, магнитные прокладки, элементы микро- и нанотехнологии, лифтовые и эскалаторные механизмы, а также магнитолевитационный транспорт.
Явление магнитной левитации в последние десятилетия получило широкое распространение при производстве транспортных колейных систем. Хорошо известно, что в транспортных средствах на магнитном подвесе сила тяжести уравновешивается силой магнитного поля. Такое транспортное средство в отличие от обычного железнодорожного или автомобильного транспорта не соприкасается с рельсом или дорожным покрытием. Таким образом в маглев-системах исключаются потери, возникающие за счет сил трения. Расход энергии определяется затратами на преодоление лобового сопротивления, на подъем платформы, разгон и торможение, на преодоление магнитного сопротивления. Основные потери возникают за счет сил аэродинамического сопротивления. Путем правильного выбора формы вагона можно значительно снизить энергопотери и увеличить скорость до 500 км/ч, а при использовании аэродинамической трубы – до 1000 км/ч.
Системы левитации и боковой стабилизации
Магнитолевитационный принцип движения является бесконтактным. Одной из основных задач при этом является подвес объекта в гравитационном поле Земли. Для компенсации сил тяжести и обеспечения устойчивости объекта используются электромагнитные силы.
Принцип действия системы электромагнитного подвеса основан на применении закона Ампера, гласящего, что два проводника с током взаимодействуют между собой посредством магнитного поля. Сила магнитного взаимодействия пропорциональна величинам токов проводников и длине проводников, и обратно пропорциональна расстоянию между проводниками. Эта сила взаимодействия существенно усиливается при использовании катушек. Данная технология позволяет обеспечить статическую левитацию, однако не дает большого левитационного зазора. Увеличение силы левитации связано с увеличением тока и количества витков катушки.
Различают следующие типы магнитной левитации:
1. Электромагнитный подвес.
2. Электродинамический подвес.
3. Левитация на постоянных магнитах.
4. Комбинированные системы подвеса.
Электромагнитный подвес осуществляется за счет сил притяжения (отталкивания) напольных и бортовых электромагнитов. Его достоинством является возможность управления зазором, а недостатком –¬ малая величина зазора.
Динамический подвес возникает за счет магнитного поля токов, наведенных в короткозамкнутых катушках в переменном магнитном поле первичных катушек. Система электродинамической левитации имеет преимущества в сравнении с системами электромагнитного подвеса. Прежде всего, она позволяет выше поднять транспортное средство. Однако левитация в такой системе наступает только при скорости 100 км/ч. Кроме того, она оказывается достаточно дорогостоящей из-за использования сверхпроводящих магнитов.
Система левитации на постоянных магнитах наиболее простая и не требует дополнительного электропитания и криогенной установки, что существенно упрощает конструкцию и стоимость. Однако она требует дополнительных технических решений, устраняющих боковую или продольную нестабильность системы.
Линейный двигатель
В современных маглев-системах, как правило, используются синхронные линейные двигатели. На платформе располагается роторная обмотка, на полу – статорная обмотка.
В современных системах линейный двигатель может быть совмещен с системой левитации и боковой стабилизации или разнесен с ними.
Для любого двигателя магнитолевитационной системы должны быть определены следующие параметры:
омическое сопротивление на единицу длины;
индуктивность на единицу длины;
емкость на единицу длины;
постоянная двигателя;
намагничивание и индуктивность рассеяния;
максимально допустимая температура проводника и зависимость его сопротивления от температуры;
напряжение на роторе.
В транспортных средствах по немецкой технологии Transrapid тяговый электропривод выполнен на базе обычного линейного синхронного двигателя, обеспечивающего штатное и аварийное торможение в режиме рекуперации энергии в питающую сеть.
Американская технология Inductrack применяет постоянные магниты и треки из литцы или ламината. В соответствии со сверхпроводниковой модификацией технологии Inductrack для тягового двигателя применяются сверхпроводниковые катушки.
В японских Маглев-системах используются бортовые сверхпроводниковые обмотки.
На сегодняшний день не существует единого стандарта и единых требований к инфраструктуре магнитолевитационного транспорта. Однако очевидна необходимость обязательных нижеуказанных элементов.
Магнитолевитационный путь
Во всех известных реализациях магнитолевитационный путь выполняется на эстакадах. При этом различают прямолинейные и криволинейные участки пути магнитолевитационной линии. Разветвленные участки на сегодняшний день отсутствуют. Магнитолевитационный путь включает в себя:
напольные магнитные полюса левитации;
напольную обмотку линейного двигателя;
напольную магнитную систему боковой стабилизации;
эстакаду.
Система электропитания
Система электропитания должна обеспечивать питанием как напольные элементы магнитолевитационной линии, так и бортовое оборудование. Для питания бортового оборудования может быть использован как контактный рельс, так и контактная сеть, свисающая со столбов вдоль линии. Для обеспечения магнитолевитационной линии электропитанием вдоль нее должны располагаться силовые подстанции. Расстояния между ними определяется требованиями к конкретной магнитолевитационной системе.
Станции
Как и в железнодорожном транспорте, в магнитолевитационных системах различают пассажирские и грузовые станции.
Пассажирские станции – это места, где пассажиры садятся и выходят из вагона.
Грузовые станции – это площадки для загрузки и выгрузки грузов.
Единые требования к станциям магнитолевитационных линий на сегодняшний день не выработаны.
Магнитолевитационная платформа
Оборудование магнитолевитационной платформы включает:
полюса магнитолевитационной системы;
полюса боковой стабилизации;
статор линейного синхронного двигателя;
систему электропитания при использовании электромагнитов;
систему управления и контроля.
Система управления и сигнализации магнитолевитационной линии
Система управления и сигнализации магнитолевитационной линии – это система управления магнитолевитационным транспортом с целью исключения столкновений и аварийных ситуаций и сигнализации об отклонении параметров системы от номинальных значений. Система управления и сигнализации может быть:
1) полностью автоматической – управление осуществляется с помощью электронной системы на основе заложенной программы движения;
2) автоматизированной – управление осуществляется как с помощью электронных команд, так и с помощью инструкций движения, передаваемых от ответственных за участок магнитолевитационной линии бригаде судна.
Стандартный метод блок-участков должен делить пути на отдельные зоны.
Процесс сигнализации предположительно должен происходить на постах централизации, расположенных на определенных интервалах вдоль магнитолевитационной линии.
Система безопасности
Система безопасности предохраняет от аварий в случае экстренных ситуаций. В ее рамках предусматривается обеспечение удержания подвижного состава на инфраструктуре в случае внезапного обесточивания, экстренное торможение при возникновении нештатных ситуаций и др.
Магнитолевитационный транспорт является эстакадным видом колейного транспорта и обладает всеми достоинствами и недостатками эстакадных линий.
К достоинствам относятся, прежде всего, безопасность, экологичность (пониженный уровень шума за счет отсутствия трущихся поверхностей и отсутствие вредных выбросов в атмосферу), скорость и сниженное энергопотребление за счет отсутствия сил трения. Высокая пропускная способность также является достоинством.